Tsukuba Challenge 2013

Introduction
The Valeo Innovation Challenge is part of Valeo’s innovation strategy, supported by the company’s annual Research and Development budget of over €1 billion. Offering young students worldwide the opportunity to make the car of 2030 and the way it's used more intelligent, intuitive, green and fun. Comprising teams of two to five people, students from any discipline can take part by presenting a relevant, innovative project in English. The aim is to stimulate the students’ creativity, enabling them to form multidisciplinary teams.
1,324 teams from all over the world registered to participate in the Valeo Innovation Challenge 2015. Great ideas, great projects that mostly dealt with the themes of safety, CO2 emission reduction and intuitive driving developement. The six finalists teams came from China (two teams from the Peking University), India (a team from the Sri Aurobindo International Centre of Education), Germany (Universität des Saarlandes and Leibniz Universität Hannover) and Spain (University of the Basque Country).
For more details please visit Valeo Innovation Challenge 2015
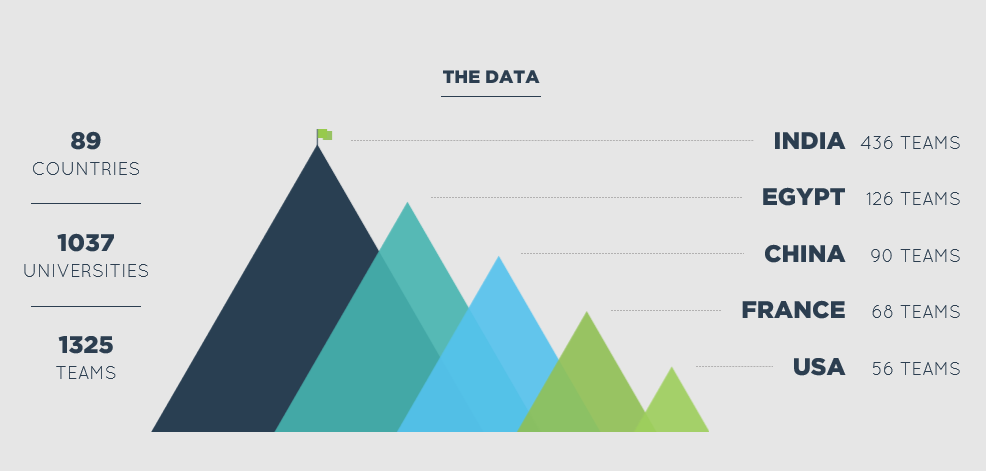
Universities and countries
Team FalconView (1st Prize)
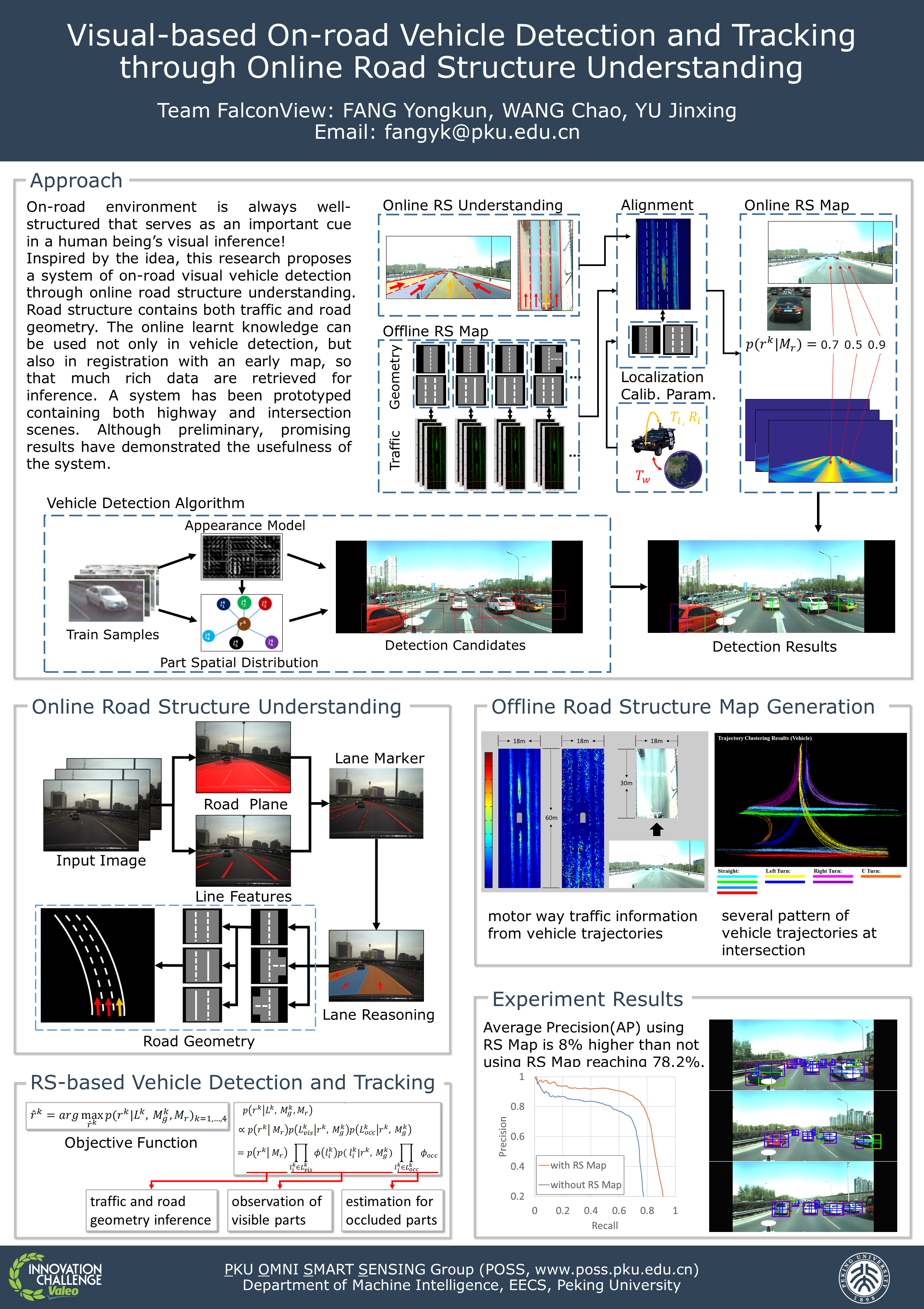
Vehicle detection is a key technique of an ADAS (Advanced Driving Assistant System).Many systems have been studied by using the onboard sensors such as a camera to detect surrounding vehicles, so as to analyze potential risks and provide warning assistances. However in a complex real world traffic, vehicle techniques still face great challenges.
On the other hand, lane, traffic, experience and knowledge serve as important cues in a human driver's visual inference, when making decisions at complex conditions.Inspired by the idea, this research proposes a system of on-road visual vehicle detection with inference on road structure and traffic data. Road structure means the static road environment, such as lane and road geometry. Traffic data provides statistics to vehicles' location and motion that are usually regular and constrained by traffic rules. The online learnt knowledge can be used not only in vehicle detection, but also in registration with an early map, so that more historic or other resource data can be retrieved for inference.
A system has been prototyped. By using the on-road data that are collected by an intelligent vehicle, the prototype system is examined at both highway and intersection scenes. A result at highway scene demonstrates that the inference using road structure and traffic data can largely improve vehicle detection accuracy, about 8%.
Team PKU-One (One of the top 6 teams)
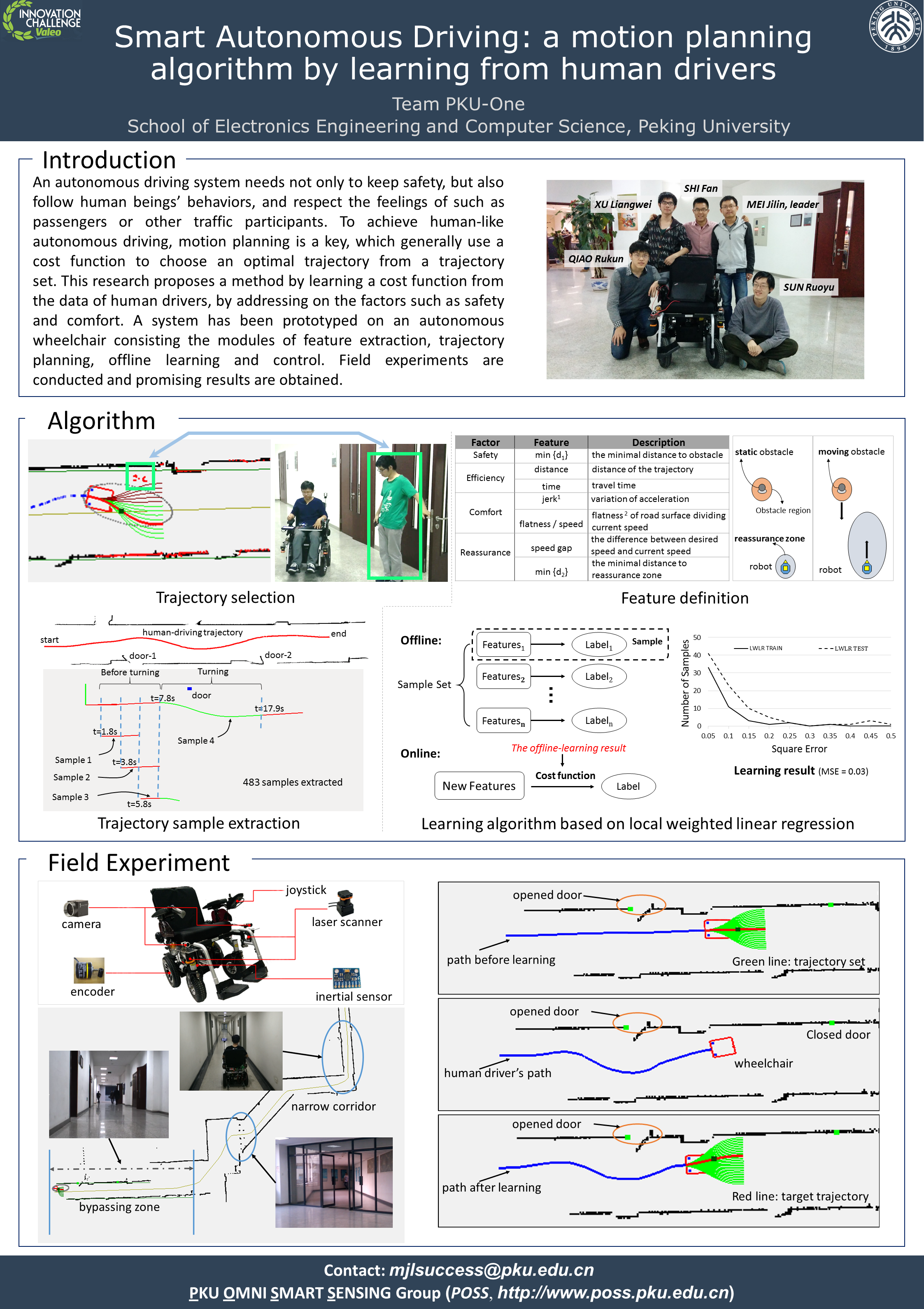
An autonomous driving system needs not only to keep safety, but also follow human beings’ behaviors, and respect the feelings of such as passengers or other traffic participants. Motion planning is a key module of an autonomous driving system, which develops a trajectory to be carried out by the control module according to online situations, while how to develop a cost function to choose an optimal trajectory from a a set of candidate trajectories that achieves human-like driving is crucial.
This research proposes a method by learning a cost function from the data of human drivers, by addressing on the factors such as safety and comfort. A system has been prototyped on an autonomous wheelchair consisting the modules of feature extraction, trajectory planning, offline learning and control. Through human driving data collection, algorithm embedding and field tests, the proposed method has been examined and promising results are obtained.