POSS Odometry: A Visual and LiDAR Odometry Dataset in Campus Environment
Overview
-
We present the POSS odometry dataset, which contains 36924 frames captured in the campus of Peking University. Each frame contains LiDAR data, grayscale monocular camera data, colorful monocular data and ground truth pose information. LiDAR data are captured with Velodyne 32e, and each frame of the LiDAR data is saved in a seperate bin file. Camera data are saved in loss less png format. With this dataset, you may test monocular visual odometry algorithms, laser-based SLAM algorithms or algorithms that combine visual and LIDAR information. This dataset is used for Localization and Mapping task. And for convenience, the provieded dataset uses the same data format and API as KITTI Odometry.
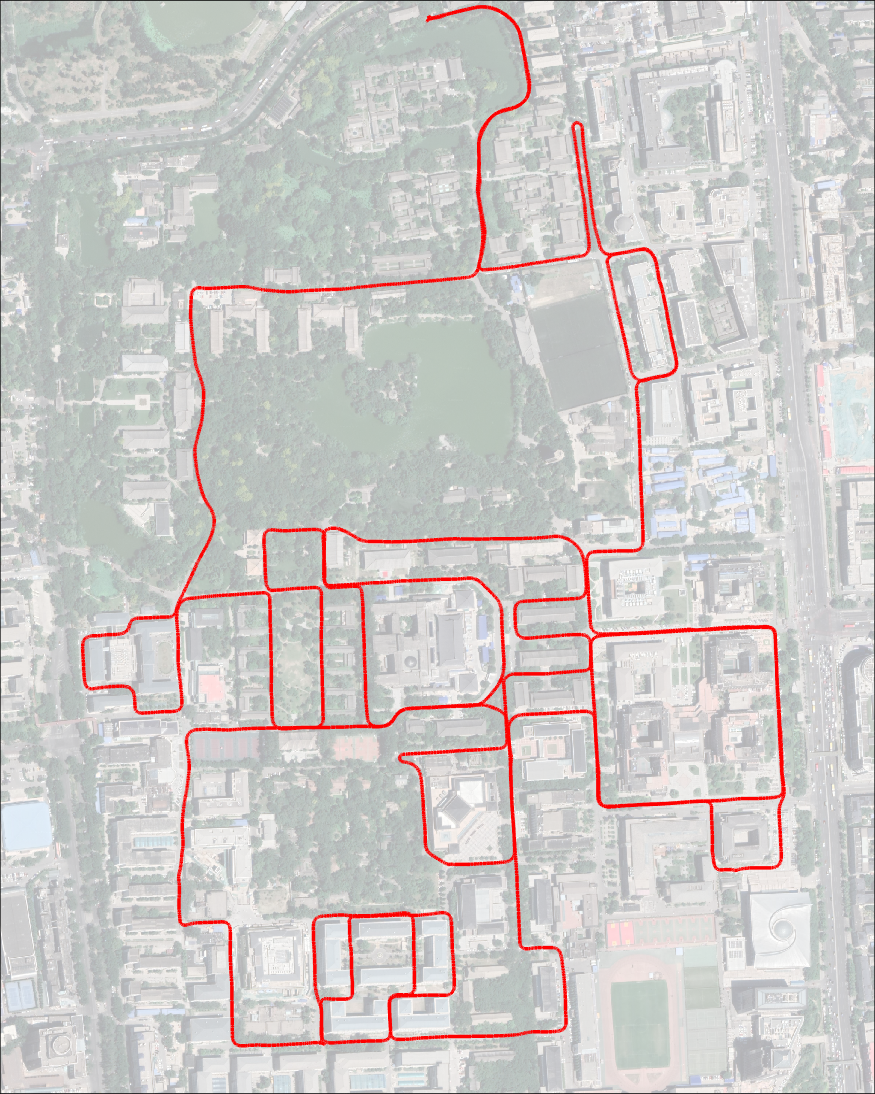
The following figure demonstrates the ground truth trajectory of the dataset on the Google map.
Note
-
2023.03.27: The calibration file has been updated with an associated readme.
Data format
-
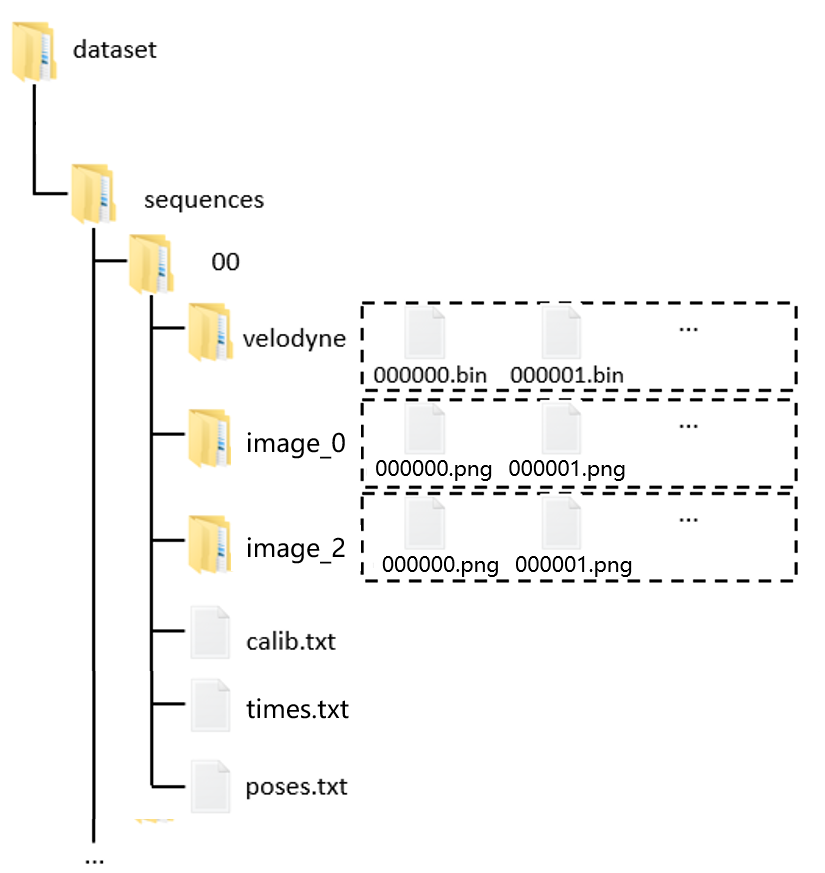
The folder structure and data format are same as the KITTI odometry dataset. File XXXXXX.bin in velodyne folder is the point cloud data. File XXXXXX.png in image_0 folder is the grayscale image data. File XXXXXX.png in the image_2 folder is the colorful image data. poses.txt contains the ground truth trajectory information. times.txt contains the time of the each frame from the first frame. calib.txt contains the calibraiton information which is in the same format as KITTI.
Download
-
Download odometry data set (grayscale, 12 GB)
md5: dd583f4e3af5726f36126971f956eb1d
Download odometry data set (color, 38 GB)
md5: 7a064205cf1a7c71c373e2754faa9294
Download odometry data set (velodyne laser data, 24 GB)
md5: feac5a3b0371622f1fde86e17bd33488
Download odometry data set (calibration files, 1 MB)
md5: eb84902b2cd8d6a1dd9fd7ff992b1292
Download odometry ground truth poses (2 MB)
md5: 0eb3143ecccf812f011c303780cc708d
View the related paper
View the open-source code
Cite
- @INPROCEEDINGS{ju2021adaptivecovarianceerrormodel,
title={Learning Scene Adaptive Covariance Error Model of LiDAR Scan Matching for Fusion Based Localization},
author={X. Ju and D. Xu and H. Zhao},
journal={IEEE Transactions on Intelligent Transportation Systems},
title={Scene-Aware Error Modeling of LiDAR/Visual Odometry for Fusion-Based Vehicle Localization},
year={2021},
pages={1-15},
doi={10.1109/TITS.2021.3058054}
}
License
- This dataset follow Creative Commons Attribution-NonCommercial-ShareAlike 3.0 License.